Introduction:
– Controlling DC motor using PIC32 microcontroller to follow cubic and step trajectories.
– H-bridge A3909 and current sensor circuit MAX9918 with dsPIC33FJ64MC802 to design and build the circuit.
– Implemented PID for motion controller and PI for current controller for error reduction working at 5 KHz.
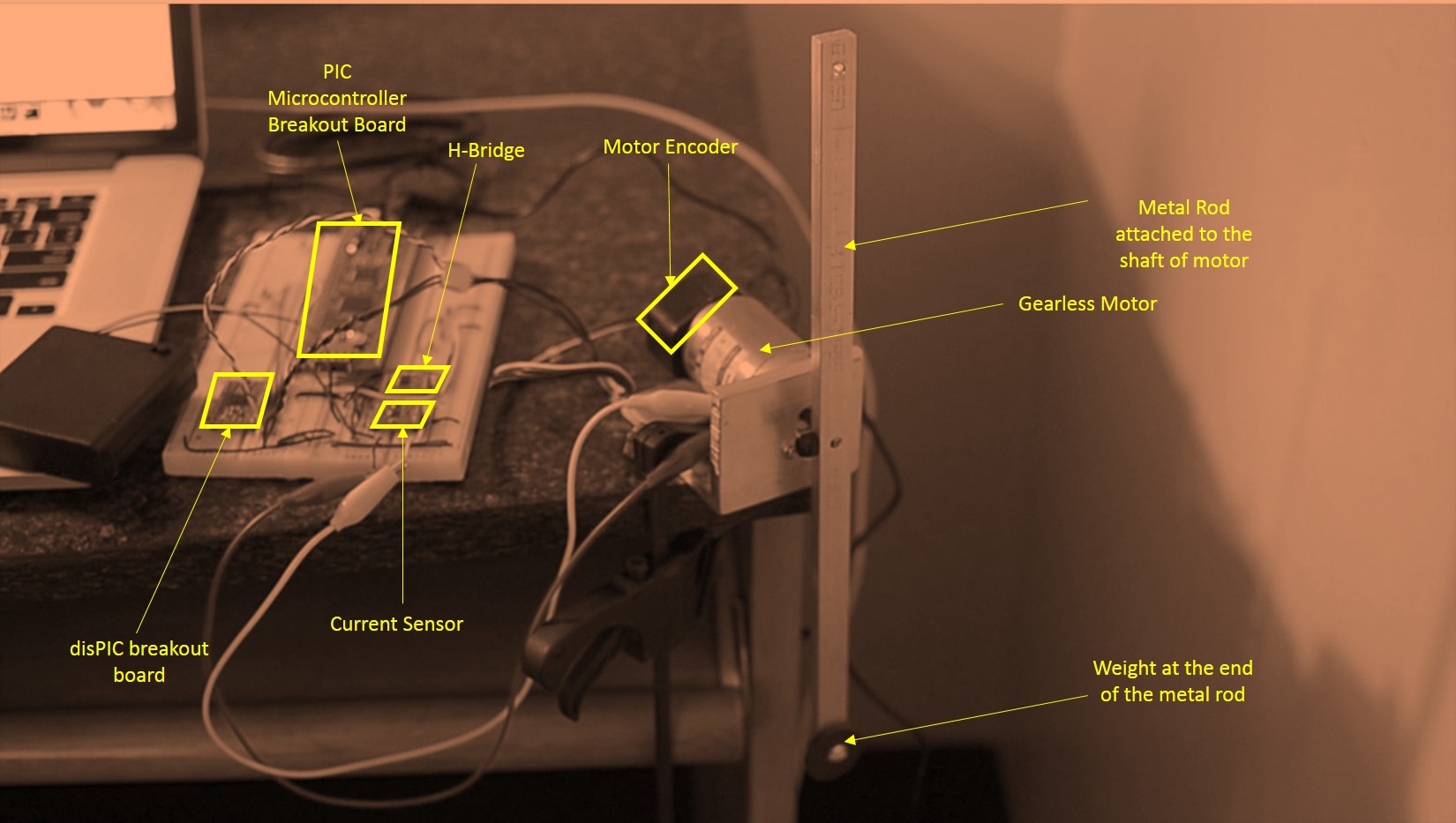
Device:
Trajectory tracking on MATLAB:
Following are trajectories plotted using MATLAB. Blue line is the reference and green line is the response:

Above is the plot of Cubic Trajectory
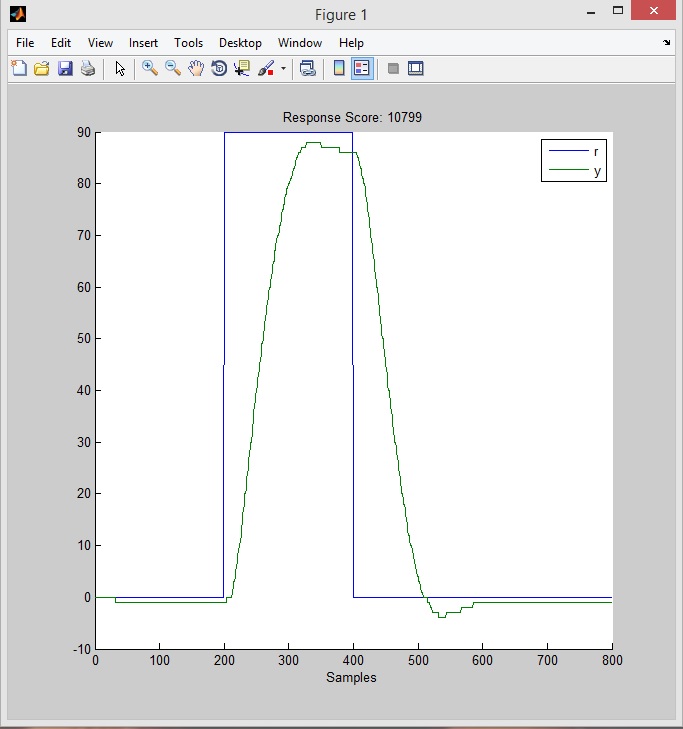
Above is the plot of Step Trajectory

Above is the response of Knocking the metal rod
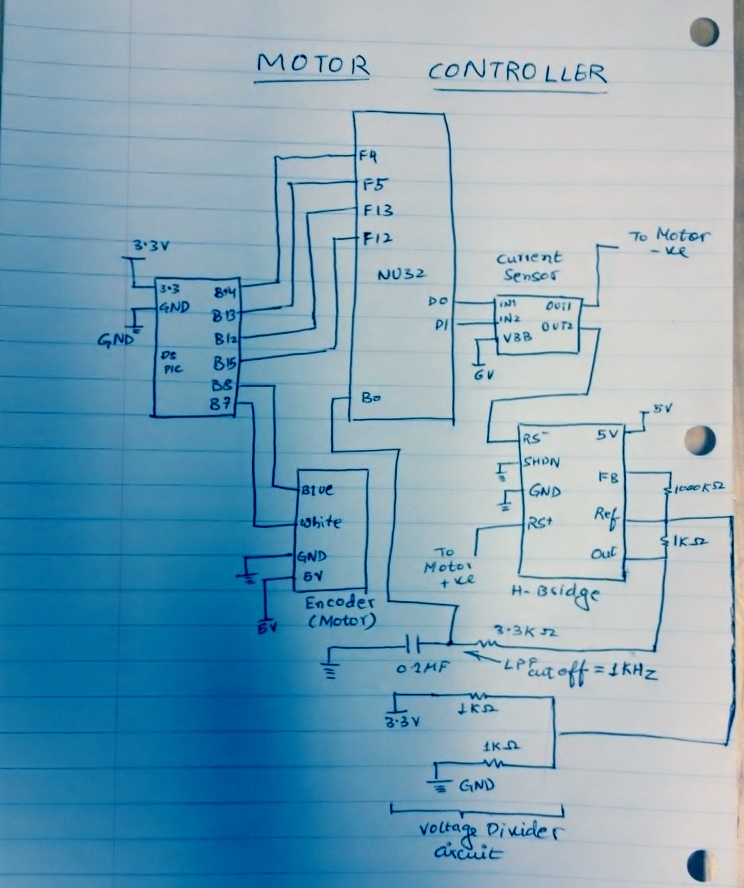
Schematic:
Below is the circuit diagram for motor controller which clearly illustrates the connection that needs to be done with H-Bridge, DsPIC, Current Sensor IC and how to connect it with motor. The diagram also gives the information about the capacitor and resistances to be used for divider voltage circuit and low pass filter.